このページを正しく読むためには MathML の表示のための数式フォントが必要です.
Firefox, Netscape(6.0以降)など Moziila 系ブラウザであれば,
次の手順に従ってフォントをインストールしてみてください.
→ Firefox のインストールとその他の設定の手順
なお,IE の場合には MathPlayer というのも組み込まないとハングするようです.
ここではまず Euler 法の問題点を調べて,それを改善するための より高い近似法である Leap-Frog 法を使ってみます. その後,物体の落下の問題を取り扱います. これらは力学的なシミュレーションの基礎となるものです.
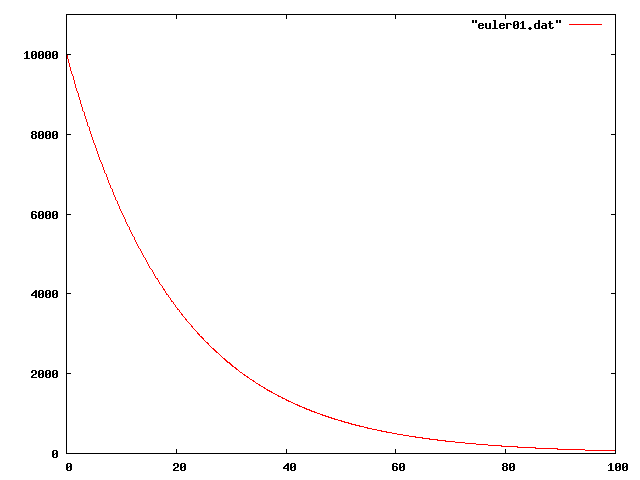
上の図を見てください.赤はある微分方程式を解析的に正確に解いて 得られた曲線です.その下側にある折れ線は,非常に大きな間隔を 使って Euler 法で同じ微分方程式の解を求めたものです.正しい 曲線に比べて,Euler 法では解が小さな値をとってしまっていることが 分ります.その原因はどこにあるのでしょうか.
グラフの左下は,計算の出発点です.本来の解と,Euler 法による解とは, 出発点での向きは一致しています.Euler 法による解は,そのまま直線で 延びているのに,正しい解の法は,そこから上向きにカーブしています.この 違いが問題だということは,見ればわかります. つまり,Euler 法は,
下の図を使って,そのことを詳しく説明してみましょう. 解かれるべき微分方程式は
$\frac{dx}{dt} = f(x,t) $です. これを解いて得られる正確な解は
$x = F(t)$であるとします.
このグラフを見るとき,横軸は $ t $,縦軸は$ x $ になっているこ とに注意してください(グラフはいつでも 横軸が $ x $,縦軸が $ y $ だと思わないように!). $ t $ は時刻, $ x $ は位置ということにして説明します.
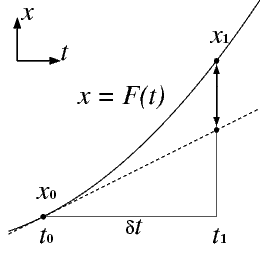
いま,時刻$ t_0 $ で 位置が $ x_0 $ にあったとしましょう. この点でのグラフの傾きは,定義によって $ f(x_0,t_0) $ で す.図の点線の傾きがちょうどそれになっていることは 見ればわかるでしょう. この時点から ある短い時間 $ \delta t $ が過ぎた時刻 $ t_1 $ での 位置を予測したいのです. その計算方法は簡単で,
上昇の幅=傾き×水平のずれなのですから,
$f(x_0,t_0) \delta t $がグラフの上昇分に相当します. これを元の位置 $ x_0 $ に加えてやれば, $ t_1 $ での 位置が得られます.つまり,
$ x_1 = x_0 + f(x_0,t_0) \delta t $として,次の位置 $ x_1 $ を求めます. これが Euler 法の考え方です.
ところが,こんなふうにして得られた点は,本当の解の曲線上には乗ることが できず,ずれが生じてしまいます.図の矢印は真の解における 位置 $ x_1 = F(t_1) $ と,上の計算で得られた 答とのずれを示しています. このように,Euler 法は解となる曲線が曲がっていることを 考慮しない計算法なので,そのことによるずれは避けられません.
もっともこれでも 間隔を十分に細かく取って計算してやれば,正確な解にいくらでも 近い結果を得ることが,原理的にはできるはずです.なぜなら, 自然は瞬間瞬間の傾きから,その次の無限に近い点を決めて動いている といってもよいのですから.
ところが,このような差分法を非常に細かい区切りで実行することには, 次のように2つの問題点があります.
時間 $ t$ とともに変化する量 $ x $ が次の微分方程式に従うものとします.
$ \frac{dx}{dt} = f(x,t) $Euler 法ではこれを素朴に差分化したわけですが, ここではちょっとした仕掛けを設けて,別の形の差分を導きます.
まず$ t$の 関数$F(t) $ の微分の定義というのは, 通常次のように表されます.
$ \frac{d F(t)}{dt} = \lim_{h \rightarrow 0} \frac{F(t+h)-F(t)}{h} $Euler 法というのは,この式 で無限小として扱われる $ h $ を 有限の大きさ$\delta t $ として, 次のように差分の形で扱ったものです.
$\frac{F(t+\delta t)-F(t)}{\delta t} = f(x) $この扱いの意味とその問題点については,すでに述べました.
さて,ここで微分の定義を次のようにひとひねりして書いてみます.
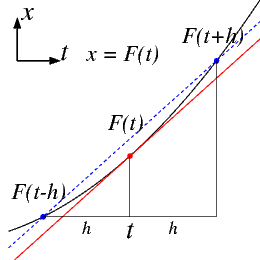
$ \frac{d F(t)}{dt} = \lim_{h \rightarrow 0} \frac{F(t+h)-F(t-h)}{2h} $本来の微分の定義における幅 $ h$ を,接線の傾きを求めたい点の前後にとって, それに合わせて増分 $ h$ も $ 2h $ にするわけですから,これでも 構わないわけです. 下の図を見てください.上の式による微分の定義は,2つの青い点 を,$ h $ を小さくすることによって, 中央の赤い点に近づけて行ったときに得られる赤い線が, $ t $ におけるこの関数の傾き(微分)であることが, 図から理解できるでしょう.
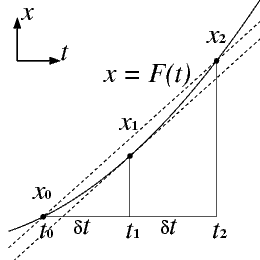
Leap-Frog 法は上記のような微分形を差分化したものと 考えることができます. $ h $を有限な刻み $ \delta t $ に置き換え,さらに $ t-h \rightarrow t_0 $, $ t \rightarrow t_1 $, $ t+h \rightarrow t_2 $, $ F(t-h) \rightarrow x_0 $, $ F(t) \rightarrow x_1 $, $ F(t+h) \rightarrow x_2 $ という置き 換えを行ったのが下の図です.
これを使った差分方程式の形は次のようになります.
$\frac{x_2-x_0}{2 \delta t} = f(t_1) $これを変形すると,次の式が得られます. これが Leap-Frog 法の基礎となる式です.
$x_2 = x_0 + 2 f(x_1,t_1)\delta t $この式の意味は次のように解釈できます.上の図を見てください.
$ t = t_1 $ における接線の傾きは $ f(t_1)$ です.この接線を上にずらしてやって, ちょうど $ x_0$の点を通るようにしてやります.その点から $ 2 \delta t $ だけ進んだところでの 上昇分 $ 2 f(t_1) \delta t $ を $ x_0$ に加えると,$ x_2 $ の値に近い値が得られるはずです.
このやり方では,$t = t_0 $ からの増加分を求めるのに, その時点での微分係数 $ f(t_0)$ を用いずに, 目的とする点までのちょうど半分のところでの 微分係数を使っています.ですから,曲線の曲がりの効果も 計算に含まれることになり,計算の精度は改善されることになります. Leap-Frog 法の精度についての説明は下に示してありますから,参考にしてくだ さい.
実際に Leap-Frog 法をプログラムに組み込もうとすると, Euler 法にはなかった問題点にぶつかります.それは, 初期値が1つではすまないということです. つまり,Euler 法では最初の時刻 $t =t_0 $ での $ x = x_0 $ の値さえ分れば,それら を $ f(x,t)$ に代入して $ f(x_0,t_0)$ を得て,それから 傾きを計算することができました(お湯の冷却問題では, $f(x,t) $ は $t$ には依存しないので,単に $f(x) $の形になっています).ところが Leap-Frog 法では,次の点の値を予測するために必要な 傾きは $ \delta t$ だけ進んだ時点 $ t = t_1 $ での傾きなのです. その瞬間の$x $ の値は $ x_1 = F(t_1) $ なので すから,そもそも $ F(t)$ を求めようというのに,先にその解を 知らないといけないという自己矛盾が発生してしまいます.
上記の難点を切り抜けるためには, とりあえず Euler 法のやり方で $ x_1 $ を求めてしまおうというやり方を 取ることにします.つまり,$ t = t_0$ の時の 傾き $ f(x_0,t_0) $ を使って,次のように $ x_1 $ を求 めるのです.
$ x_1 = x_0 + f(x_0,t_0) \delta t $これはすでに出てきた Euler 法のやり方そのものです.そのために生じる誤差は我慢するしか ありませんが,こうやって得た $ x_1 $ さえあれば, その後は順次計算を進めることが可能です. それでは実装のための段取りを考えましょう.
Leap-Frog 法を実装するために,その手続きを書き並べてみます.
#!/usr/local/bin/ruby
def f(x) # f(x,t),ただし,この場合には f は t に依存しない.
return 0.1 * x
end
tstart = 0.0 # 始まりの時刻
tend = 10.0 # 終了時刻
xinit = 1.0 # x の初期値
nstep = 10 # 分割区間の数
dt = (tend-tstart)/nstep
dth = dt/2 # dx の半分
t = tstart
x0 = xinit
x1 = xinit + dth * f(x0) # 最初に x1 を求めておく.
for i in 1 .. nstep
printf("%12.9f %12.9f\n",t,x0)
printf("%12.9f %12.9f\n",t+dth,x1)
x2 = x0 + dt * f(x1)
x3 = x1 + dt * f(x2)
t = tstart + i * dt
x0 = x2
x1 = x3
end
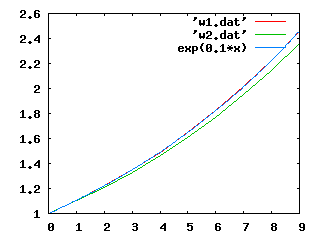
このソースを使って実際に計算した結果を下に示します. 赤が Leap-Frog 法による結果,青は解析的な厳密解,緑は Euler 法による結果です.Euler 法に比べて格段に精度が 向上していることが分ります.
| Leap-Frog 法の精度 |
|---|
|
この図で,$ (t_0,x_0) $ と$ (t_2,x_2) $ の2点を結んだ点
線が,
もしも$ (t_1,x_1) $ における$ x = F(t) $ の接線と平行であるなら,
Leap-Frog 法の近似は厳密に正しいことになるはずです.なぜならそのとき,
$ (t_0,x_0) $ を通って,この接線と平行な直線は,
$ (t_2,x_2) $ を通ることになるから. この条件が成立するのはどういうときでしょうか.それは$ F(t) $ が $ t $ の2次までの項しか含まない多項式で表されるとき,つまり $ F(t) = a t^2 + b t + c $ で表されるときということになります(この式を上の記述に従っていじってみれ ば,簡単に証明できます).逆に3次以上の高次の項を含んでいる ときには,ここで使っている Leap-Frog 法では誤差を生じます.もちろんそれ でも Euler 法よりはずっとよい精度の結果が得られるのですが,もっと よい結果をほしいときには,さらに次数の高い項を含められるように改良された Leap-Frog 法を使うことになります. |
小波秀雄, 2005/10/19